Створити квадрокоптер як платформу для літаючого робота я планую вже дуже давно. Перші розрахунки і замовлення деталей я зробив рік ще назад. Однак, робити «просто коптер» щоб політати, керуючи з пультом або навіть в FPV режимі кінцевої завданням не є. Тому коптер повинен бути максимально гнучким і як можна менш дорогим.
Окремо всі деталі для коптера є, але їх поєднання - справа проста тільки в теорії. Потрібно бути і програмістом і інженером і моделістів - вертолітники. Тому процес рухається досить нешвидко. А літати хочеться :) Ніщо так не розхолоджує і не демотивує як відсутність видимих результатів, особливо коли прогрес-то вроде есть, але не наочний. Та й експериментувати відразу на великому квадракоптере дорого і небезпечно.
Тому я вирішив зібрати для експериментів мінікоптер. Як завжди - завдання зробити недорого, просто й гнучко.
Мій результат - готовий коптер за 1 день (на збірку і запуск) і $ 120 (вартість квадрокоптера включаючи доставку). А з апаратурою - $ 145.
« MiniQuadroCopter »
Під катом опис і відео. Buddy-коди для замовлення на HobbyKing
Кому як, а для мене основною перешкодою в коптеростроеніі завжди була дорожнеча перевірених наборів деталей (kit), які можна купити в одному місці і поекспериментувати. Адже зібравши коптер, просто так літати набридне дуже швидко, якщо, звичайно, ви не авіамоделіст, для якого це лише ще одна кумедна моделька. Найцікавіше - додати коптеру трохи (або багато, залежить від умінь і винахідливості) самостійності. Але поки піднімеш коптер в повітря витратиш стільки сил, що на найцікавіше запал вже починає згасати. Та й поки налагодити програму управління - розоришся, адже кожна помилка - це майже напевно падіння, а найдешевше падіння - це зламані пропелери.
Зараз покажу, як це подолати.
замовляємо деталі
Насправді основною бюджет коптера ще менше, всього близько $ 100 включаючи доставку.
Отже, обов'язкові запчастини:
Силовий провід або аналогічний мідний червоного і чорного кольорів (+ -)
$ 1,29
Радіоапаратура у мене Turnigy 9x , яку я допрацював для використання з LiIon акумулятором і впаяли роз'єм для оновлення прошивки апаратури (я користуюся прошивкою er9x ), але її зараз дуже довго чекати через її популярності, тому й не став її рекомендувати. Взагалі, беріть будь-яку, яка є в наявності і яка вам подобається з кількістю каналів від 4. У мене Mode2 (ручка газу зліва), але це не принципово. Якщо візьмете 6-канальну Hobby King 2.4Ghz 6Ch Tx & Rx V2 , не забудьте до неї шнурок для програмування, тому що на ній самій ніяких налаштувань не зробити, навіть реверсировать канали. Налаштовується тільки з ПК.
Я купував на HobbyKing тільки тому, що абсолютно все, що нам знадобиться можна замовити там, але ви можете брати на rctimer.com або в будь-якому іншому місці. Якщо будете брати на HK, замовляйте відразу внизу потрібні combo деталі - так буде дешевше, ніж набирати їх окремо. ЗІП:
Нам знадобляться ще гвинтики М2х10 або М3х10 (їх простіше дістати в магазині, але доведеться трохи рассверлить отвори в кріпленні моторів, це нескладно).
Акумуляторів беріть по можливості хоча б пару. Якщо немає зарядки для LiPo акумуляторів, теж
беріть, це разове вкладення, стане в нагоді.
Пропелерів беріть побільше. Не дивіться, що їх по 5 штук в пакеті. Я в перший день зламав 4 штуки, поки налаштовував і виявив глюк в прошивці. :) Це витратний матеріал, особливо в тісній кімнаті як у мене.
Запасні мотори теж, напевно не завадять, але це пізніше, відразу ви їх навряд чи зламаєте.
Знадобиться також паяльник, трохи припою і флюсу, термозбіжна трубка діаметром 2 і 5 мм або ізоляційна стрічка, гумка для грошей або від трусів для кріплення акумулятора :)
Як тільки визначилися що у нас є, а що замовляємо і в якій кількості, замовляємо і спокійно чекаємо ще тижнів три (ну це як пощастить з поштою).
Збираємо наш квадрік
Збирається весь квадрокоптер за 1 вихідний. Насправді навіть швидше. Я витратив близько 6 годин в сумі, працюючи не поспішаючи.
Спочатку збираємо раму. Приходить вона ось в такому вигляді (дрібні деталі на фото відсутні, вони в пакеті)
« MiniQuadroCopter Frame »
Боковинки кожного променя склеюємо за допомогою ПВА-М або суперклею (ПВА-М дає міцні еластичні шви, але збирати раму краще ввечері, щоб до ранку залишити клей висохнути як слід). Збираємо все промені і приклеюємо до нижньої центральної пластині. Верхню поки відкладіть в сторону. Ніжки променів склеюються з двох однакових половинок. Оскільки в промені всього 5 деталей (2 стінки і три розпірки :), думаю, що складності в збірці не складе.
Відкладаємо раму сохнути до ранку. А з ранку дістаємо паяльник, термоусадку, проводи й сідаємо паяти.
Спочатку протягуємо дроти всіх 4х ESC в промені ось таким чином:
« ESC placement »
Потім беремо товстий провід, відрізаємо по 2 шматки червоного і чорного кольорів довжиною сантиметрів по 5-7. Зачищаємо з кінців по 5 мм і в середині приблизно 5-7 мм. Шматки споює зачищеними центрами хрест-навхрест. Вийде два хрести - чорного і червоного кольорів. Кінці поки просто залудити.
Потім до червоного перехрестився припаюємо червоні кінці від всіх чотирьох ESC, не забувши надіти шматочки термоусадочної трубки по 1.5-2 см. Те ж саме робимо з чорної хрестовиною. Розміщуємо все це в центрі квадрокоптера.
Відрізаємо ще по 1 шматку товстого дроту і припаюємо їх до перехрестився, кінці виводимо в отвір в днищі коптера, а місце спайки ізолюємо:
« MiniQuadroCopter electrics »
Перевірте всі уважно, щоб не було непропаев і коротких замикань. Припою не шкодуйте, струми тут дуже серйозні течуть, тому площа контакту потрібна побільше.
Якщо все в порядку, можна змастити ПВА-М верхню хрестовину коптера і приклеїти її, сховавши таким чином всі силові дроти всередині. На хвостик з просунути в отвір днища проводів надягаємо термоусадку і припаюємо коннектор XT60 відповідно до визначеної у ньому полярністю (червоний провід до +).
Тепер кріпимо мотори до рами парою гвинтів М3х10, підклавши із зворотного боку шайбу. Просовуючи в отвір в рамі дроти від мотора, припаюємо їх до ESC. Перед паянням надіньте термоусадочні кембрики, але поки не усаджуйте їх, після перевірки може знадобитися змінити напрямок обертання мотора, для цього потрібно поміняти місцями будь-які два дроти.
Виглядає в готовому вигляді це приблизно так:
« ESC2Motor »
Ну ось, тепер можна перевірити і налаштувати ESC і мотори.
Чи не надягаючи пропелери, підключаємо до ресивера в 3й канал - це Throttle в стандартній 4х канальної схемою (або серво-тестеру, якщо є), потім включаємо передавач (попередньо потрібно зв'язати їх-bind, ця операція описана в інструкції). Підключаємо акумулятор до конектора XT60. Після писку від ESC плавно даємо газ і перевіряємо, що мотор з ESC в порядку.
Повторюємо процедуру для інших моторів. Я б заодно порекомендував налаштувати тип батареї і скалібровать газ, але це можна і потім.
Перевіряючи мотори, зверніть увагу на напрямок обертання. Нам потрібно, щоб два мотора навпроти один одного оберталися в одну сторону, а сусідні - в різні:
Змінити напрямок обертання мотора, нагадую, можна помінявши місцями будь-які 2 з трьох проводів, які йдуть до ESC. Можна відразу пронумерувати мотори за схемою відповідно напрямку обертання і підписати олівцем на променях.
Все обертається правильно і реагує на ручку газу передавача правильно? Чудово, переходимо до плати управління.
Вона поставляється в м'якому корпусі з пеноматериала. акуратно її витягаємо, перевертаємо і вставляємо назад, а м'який корпус на двосторонній скотч або клей кріпимо на раму так, як вказано на зображенні вище, щоб стрілка дивилася між променями, на яких встановленим мотори 1 і 2.
Збоку до нього клеїмо на двосторонній скотч ресивер радіоапаратури (антену кріпимо до одного з променів):
« Connections »
Я наклеїв стрілку на корпус, щоб було легше орієнтуватися на землі де у коптера перед.
Тепер підключаємо мізки - швидше за все 2-3 з 4 ESC не дістануть до плати керування, тут то і знадобляться servo extension кабелі. Але їх можна зробити самим. Потрібна 3піновая вилка з звичайний PLS гребінки з кроком 2.54 ммм і половинка кабелю для з'єднання ресивера і плати управління (нам потрібен Female коннектор).
Підключаємо мотори відповідно нумерації в роз'єми M1-М4
« HobbyKing Multi-Rotor Control Board V2.1 »
сигнальний провід до центру плати, землю до краю (на попередній фото все видно).
Тепер підключаємо ресивер. За замовчуванням 4-х канальна настройка така:
1 - Aileron (елерони, ROLL)
2 - Elevator (тангажу, PITCH)
3 - Throttle (газ)
4 - Rudder (кермо напряму, нишпорення, YAW)
Ось і підключаємо по порядку канали до плати, на ній було підписано відповідно AIL, ELE, THR, RUDD.
Тільки не 4 проводами, а простіше: перший підключаємо як годиться - чорний провід (земля) до краю плати, сигнальний всередину, а решта три канали підключаємо одним проводом, нас цікавить тільки сигнальний провід:
« Receiver Connection »
« Receiver Connection »
Все, залишилося прикріпити батарею і коптер зібраний. Тут і настала черга гумки :)
« Кріплення батареї »
Залишилося прошити плату управління та налаштувати коптер.
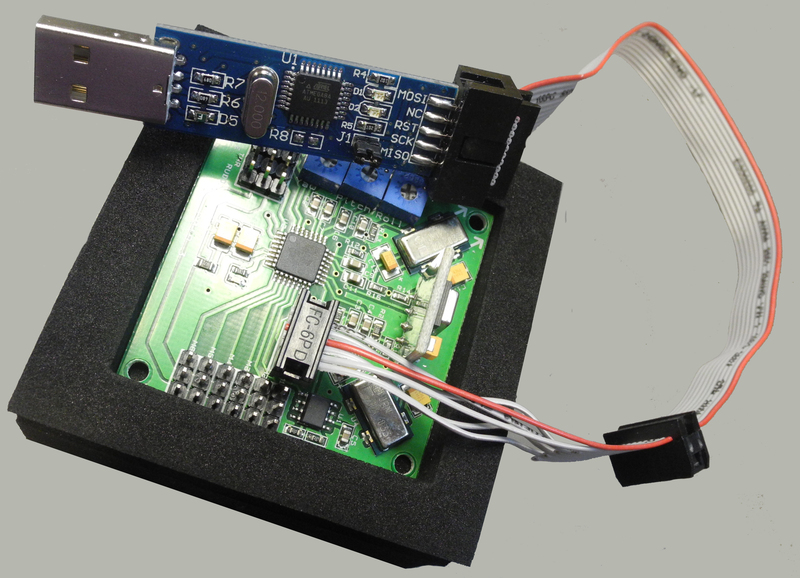
Для прошивки використовуємо AVR ISP програматор. Підключення таке:
Оскільки плата є клоном Kaptein Kuk quadrokopter, можна скористатися їх Софтинка (KKmulticopter Flash) для прошивки.
У мене стабільно запрацювала прошивка XXcontrol_KR_XCopter v2.5 . Її можна прошити за допомогою avrdude: avrdude -c usbasp -p m168p -U flash:w:XXcontrol_KR_XCopter_v2_5.hex:a
або вибрати в программульку для прошивки, вона завантажить сама.
« Quadrocopter Firmware flash »
v4.7 від Kaptein Kuk у мене заробила некоректно, тому не раджу її.
Відключаємо від програматора, виконуємо настройку по інструкції (пункти 1, 2, 4 і 8, решта за бажанням).
Все, полетіли :)
Злітати раджу повільно і дуже обережно. Спочатку поставте коптер стрілкою від себе, потрібно спробувати підняти коптер газом, якщо нахиляється або обертається, трімміруем його, щоб він злітав без перекосу (спробуйте покачати акуратно стиками елеронів і тангажа, буквально торкаючись їх, поки він ще на землі, щоб переконатися, що все канали працюють правильно, якщо немає, інвертуйте потрібні, у мене це був канал Elevator). Потім якщо він похитується стиками правильно, трохи додайте газу, щоб злетів на пару сантиметрів, і опускайте назад. Ну і далі вчимося літати :) (Я поки визначив що до чого, зламав 2 пропелера об стіну - глюк прошивки v4.7, а потім ще в процесі настройки коефіцієнтів посилення гіроскопів зламав ще пару - коптер розгойдувався і зачепив диван, будинки тісно, тому будинки більше не літаю). Якщо не впевнені чи страшно - надіньте захисні окуляри і одягніться, пропелери б'ють відчутно, мені не потрапляло по руках, але вони гострі і обертаються дуже швидко!
Як освоїте цю платформу, можна ставити свій контролер або писати свою прошивку, додавати акселерометри, барометр, компас, сонар, GPS, телеметрію, LPS лазер і робити з платформи робота. Але спочатку отримуємо задоволення, від гвинта, ми злетіли!
Вдалих вам польотів!
UPD: Сьогодні вітер стих до прийнятних близько 3 м / с, трохи підсохли після дощу і я начепивши батарею важче вийшов випробувати на вулиці.
Поводиться досить стабільно:
Більш докладний опис конфігурації, технічні деталі і ще одне відео, трохи більш динамічне цьому пості UPD2: Вже не раз запитували як запустити плату і коли повинні пискнути мотори. Додаю діаграму рухів стиками для управління платою.
При включенні харчування світлодіод не горить, плата в стані disarmed, ESC не ініціював.
Процес запуску називається Arming і супроводжується писком ESC (моторів) і запалюванням світлодіода.
відповідно - Disarming - навпаки, вимикає плату, після цього на стики вона не реагує. Вкрай рекомендую робити це перш ніж підходити до неї!
На діаграмі показано для апаратури як в Mode1 так і в Mode2 (найпопулярніший варіант, у мене такий же).
UPD 27.05.2013
Увага, я не рекомендую на даний момент купувати польотний контролер KK Multikopter зважаючи на сильну обмеженості його функціоналу.
Замість нього краще придбати будь-який сумісний з MultiWii. Наприклад Crius MultiWii SE , MultiWii Light або його аналог NanoWii на Hobbyking. Благо стоять вони тепер зовсім недорого. Налаштування його не набагато складніше , зате є можливість візуально подивитися що відбувається, підключивши його до комп'ютера і коптер зможе тримати горизонт самостійно.